寻迹小车(模拟电路版)的设计制作与调试
|
设想的效果图
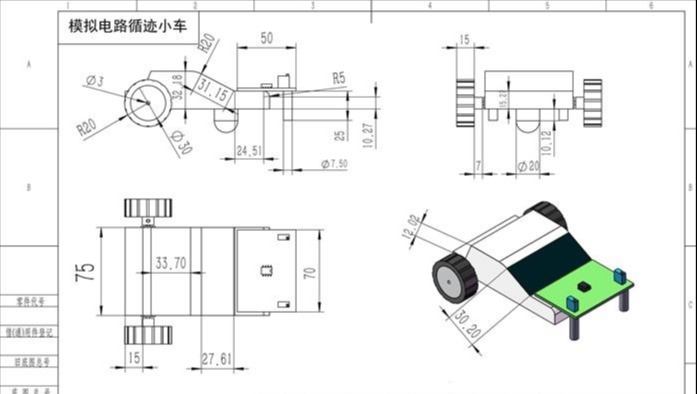
三视图及尺寸
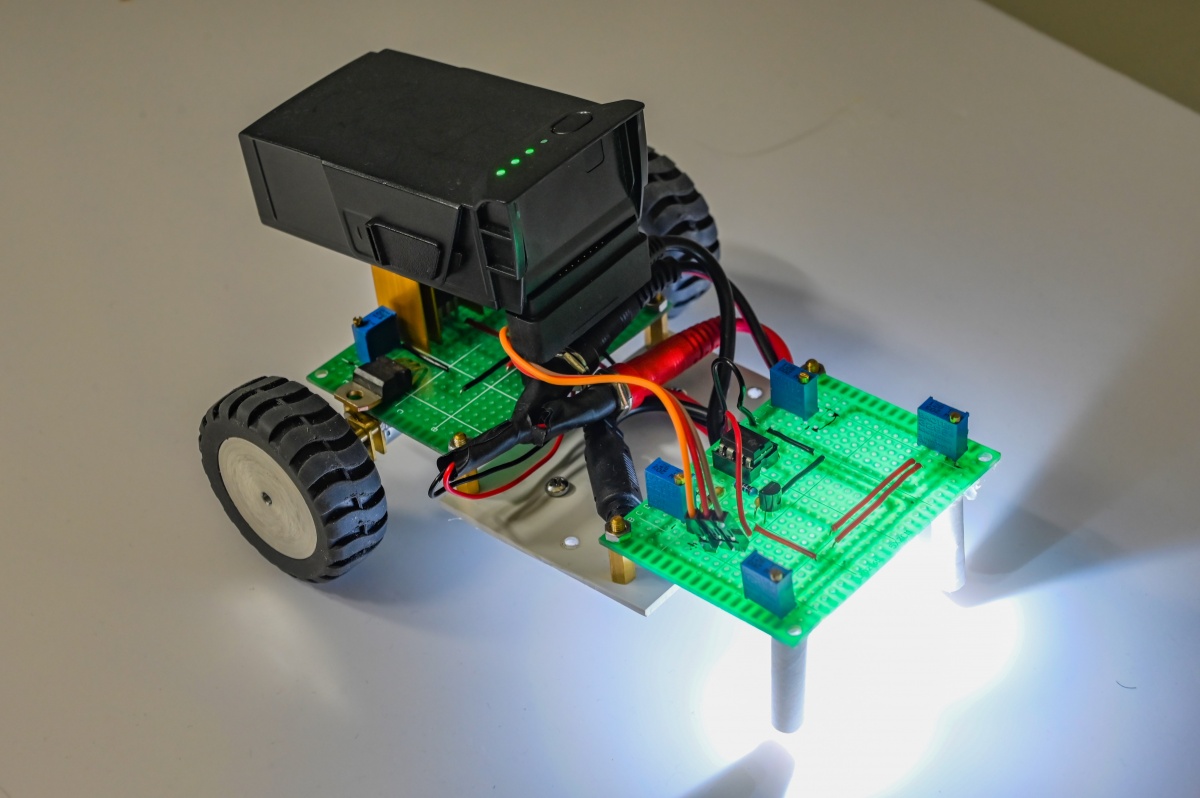
实际效果图:
硬体布局设计:在硬体布局上,光敏电阻的位置与车的转弯轴线要有足够的距离来保证有足够的反应时间,若过短,则会出现反应时间不足容易冲出跑道,若过长反应过快会也会容易反应过度冲出跑道。第三轮安装的位置尽量与马达轴线短来保证转弯半径小,转弯更灵活。电池安装位置靠中后部,让小车的前后配重相对平衡,保持驱动轮有足够的摩擦力,也不可使第三轮的摩擦力过大难以转弯。 车轮加工:车轮选择使用铝来加工,用车床加工出来的铝车轮重量没那么大,惯性小一些,因此停的时候可以停得比较快。 电路设计:在电路设计上,把马达驱动电路和黑线感测电路分开设计,LM393产生的动作信号通过排线连接传送到马达驱动电路上,方便日后改装。 一、马达驱动电路 驱动电路部分我使用TIP122三极管作为开关使用,当高电平信号过来时三极管b极时,c、e极就会导通马达就会带动车轮转动。为了控制转速,我选择调节马达供电电压的方式来控制,使用LM317T三端可调稳压管来调节,这样就可以使电压从1.25V-12V(电池供电电压12V)之间调节。图一中D2与D1这两个二极体的作用是保护LM317T防止击穿,D3和D4这两个二极体的功能是保护三极管防止击穿。如图一示为马达驱动电路原理图。
图一 二、判 断电 路 1、IC及分压电阻的选择 这里我选择LM393电压比较器(LM358也可以)来比较光敏电阻的分压值,在选用图三中光敏电阻分压电阻R4、R5的大小时,电阻值大小与光敏电阻感测白色与黑色时的电压差关系如图二示。X轴为分压电阻值大小,Y轴为分压大小,蓝色函数代表光敏电阻感测白色时,绿色函数代表光敏电阻感测黑色时。(假定感测白色时CDS阻值为50KΩ,感测黑色时CDS阻值为500KΩ,电源电压5V) 由该函数图像可得出结论:在一定范围内,选择分压电阻值越大,在感测白色与黑色时的电压差越大。(这里的电压差指图三中IC的2脚电压波动大小与IC6脚电压波动大小)电压差值越大,IC越容易判断。这里我选择20K的精密可调电阻。
图二 图三中,R1与R2这两个可变电阻是用来调节基准电压,通过这个基准电压,就可以让IC识别到该让轮子转还是让轮子停。 2、基准电压的设置 基准电压的大小尽量设置在照白色分压值与照黑色分压值中间,即图二中蓝色函数与绿色函数的中间。这样有利于IC的判断 3、IC供电设置 为了保证IC稳定,使用7805三端稳压管来保持IC的供电恒定为5V,图三中未画出。 4、LM393原理说明 LM393为双路电压比较器,一般比较器有两种输出状态分别为:开路式或者下拉低电平。LM393的输出形式为开路式输出,没有输出时下拉低电平。因此需要在输出端加上上拉电阻来保证输出时为高电平。LM393实际是比较2脚与3脚之间的电压和5脚与6脚之间的电压,然后分别在1脚与7脚输出,当2脚电压比3脚电压大时,1脚开路,电平被上拉电阻R9拉高,三极管c e导通,马达转动,同理6脚电压比5脚电压大时,7脚开路,电平拉高。
图三 图三为总电路示意图 |
||
|
相关制作图片及说明: |
||
|
|
|
|
|
说明:比较电路的焊接过程 |
说明:比较电路焊接完成后 |
|
|
|
|
|
|
说明:马达直接用焊锡焊在PCB上 |
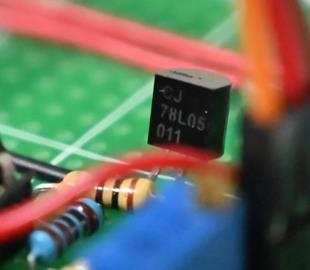
说明:用于调节马达电压的LM317T,转动旁边蓝色电阻就可调节电压 |
|
|
|
|
|
|
说明:给IC稳压用的7805 |
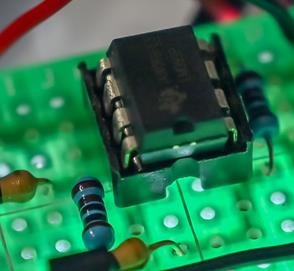
说明:LM393,两旁的蓝色电阻为上拉电阻 |
|
|
|
|
|
|
说明:用机床加工车轮 |
说明:车轮加工完后安装效果 |
|
|
|
|
|
|
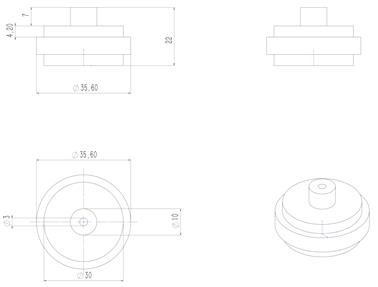
说明:自己设计并用车床加工出来的车轮 |
说明:轮子设计时的三视图 |
|





寻迹小车(模拟电路版)的设计制作与调试相关推荐
- 基于STM32F103C8T6的六路寻迹小车制作攻略
文章目录 前言 一.所需材料 二.组装步骤 三.代码讲解 总结 前言 寻迹小车是一个入门级别的东西,可以通过制作一辆寻迹小车熟悉单片机的一些基础操作,比如运用GPIO口.串口通信等单片机知识.寻迹我采 ...
- STM32红外寻迹小车
STM32红外寻迹小车(寄存器版) 最近学习了STM32,想通过制作一辆小车来加深对STM32的理解,在平时学习时经常用正点原子提供的源代码稍加该装就行,但是正点原子没有提供关于红外寻迹模板的相关程序 ...
- 寻迹小车驱动模块电路设计
最近电子综合实训,做寻迹小车,自己设计电路.先来讲一下驱动模块. 驱动模块是由两个双H桥连接成的电路,仿真图如下: 也就是两个上面这种电路组成. H桥,因外形与H相似而得名,常用于逆变器(DC-AC转 ...
- 寻迹小车 FOLLOWME—— 电机测速及转速控制
寻迹小车 FOLLOWME-- 之五:电机测速及转速控制 此篇涉及电机的测速和转速控制. 寻迹小车 FollowMe -- 之五:电机测速及转速控制 作者:Hanker 前面已完成了车的主体,控制部分 ...
- 寻迹小车逻辑电路模块
我们设计的小车是二路寻迹小车, 用了两个光电对管RPR220.小车的主要逻辑功能是是,如果左边的RPR220寻迹到黑线,左轮反转,右轮正转,实现左转;如果右边PRP2200寻迹到黑线,右轮反转,左轮正 ...
- 基于51单片机的寻迹小车
智能车刚入门,前段时间制作了一个51寻迹小车,就是网上那种寻迹是用四个红外传感器,驱动是L298N,主板是自己焊接的51最小系统加了一个7805将电池的7.2v稳压成5v(虽然我直接用的电池电压),原 ...
- STM32f4日记8之四轮三路寻迹小车实验(小车实验二:红外模块检测寻迹(左拐,右拐,前进,停止))
STM32f4日记8之四轮三路寻迹小车实验(小车实验二:红外模块检测寻迹(左拐,右拐,前进,停止)) 板子:stm32f407zgt6正点原子迷你版 作者:shawn 2021.2.14(大年初三) ...
- 关于寻迹小车组装建议
太君组装寻迹小车 先说我碰到的问题: 焊接要注意,而且尽量先焊接再组装. 组装前应该先考考虑所有零件在小车上的布局. 每次接线时注意正负. 不要带电源组装. 修改电源线时请一根一根剪. 虽然有些常识我 ...
- STM32版CCD线性摄像头寻线寻迹小车
基于STM32F103C8T6的CCD线性摄像头寻线寻迹小车 目录 基于STM32F103C8T6的CCD线性摄像头寻线寻迹小车 前言 一.模块介绍 二.使用说明 1.引脚说明 2.其他 三.调试过程 ...
- 51“motorrr”寻迹小车学习1电机和寻迹模块
目录 一 硬件 二 软件 前几天完成了寻迹小车的电机和寻迹模块的学习,这里板子用的是51最小系统板. 一 硬件 电机驱动模块L298N 和 寻迹模块 其实也没什么,pwm控制速度再加上寻迹模块,主要是 ...
最新文章
- R语言data.table导入数据实战:data.table使用by函数进行数据分组(aggregate)
- Altair PollEx 2020中文版
- Java教程之JDBC中的常用接口和类
- LeetCode 02.两数相加
- 数据结构-树2-二叉树各种函数实现
- 《读书报告 – Elasticsearch入门 》----Part II 深入搜索(2)
- python 按钮控件_python实现360皮肤按钮控件示例
- 服务器的安装文件,服务器存储安装文件
- 对方删了你的微信,你列表依然有ta的存在,该不该也把ta删掉?
- Nginx中conf相关配置的简要说明
- css覆盖规则_条件 CSS
- MySql 中文乱码问题
- F1-Score相关概念
- 美国迈阿密二手房房价预测
- STM32开发笔记106:解决ST-LINK的Old ST-LINK firmware/ST-LINK already usde问题
- SAP BASIS ADM100 中文版 Unit 2(1)
- 【Android系统】虚拟按键 平板设备中重叠的问题
- 密码学Kerberos协议理解
- PHP --方法调用
- GCTA学习4 | GCTA说明文档--功能分类及常见问题
热门文章
- 大年初七,小灰在西双版纳看人妖
- 忘记虚拟机主机管理员登录密码
- java前端怎么和后端连接_web后端和前端是怎么连接的
- 计算机网络中分组交换的要点是什么,【分组交换的要点】_试简述分组交换的要点_02、试简述分组交换的要点。...
- Python二进制、八进制、十进制、十六进制互转示例
- linux yum卸载与安装软件包,Linux yum命令详解(查询、安装、升级和卸载软件包)...
- Javascript正则入门
- Java中的OutOfMemoryError的各种情况及解决和JVM内存结构
- 全基因组关联分析(GWAS)软件:Tassel5
- zookeeper中dubboo节点过多导致dubbo-admin启动失败排查