LiDAR 22.04.27课堂笔记文件汇总
一、课堂提问
地基的激光扫描仪和全站仪有什么异同点?
同:光电测距等方式 异:单点测绘与多点测绘
两者都无接触,采用激光测距
相比之下地基能测水平方向,天顶距和坡度距,主要用于计算点云数据,包含扫描系统
激光扫描仪需要人工去对准目标吗?
不需要
有没有不需要人工照准的全站仪?
有的,徕卡精密监测机器人 具有自动照准功能
智能型全站仪,在自动化全站仪的基础上,仪器安装自动目标识别与照准的新功能
激光扫描仪需不需要架设棱镜?
不需要
那有没有不需要架设棱镜的全站仪?
有,只需要将参数调整为无棱镜模式即可
所以激光扫描仪能不能理解为免棱镜的测量机器人?
不能,两者虽然都是测绘仪器但有差距,激光扫描仪专攻多点,点云,测量机器人终究是全站仪,一个一个点测
测量机器人仍是单点连续测量,效率仍然低下
激光扫描仪利用连续的激光束获取点云,同时也可以反映空间内的反射强度
如果不考虑点数的多少,激光扫描仪的测量原理和免棱镜的测量机器人是不是一样的?
是,都是通过三角测量获取点的位置
用棱镜和不用棱镜有什么区别?
棱镜模式下精度更高一些,测量成功率也更高一些,目的是使得能获得最强的回波信号
使用棱镜时有棱镜常数限制 使得接收的电磁波尽可能接近发出的电磁波波长
无棱镜模式还有漫反射 影响精度
二、课堂讨论
不同的测距方式适用于什么平台(Platform)的激光雷达?哪种扫描方式得到激光点分布最均匀?
- 脉冲激光具有峰值功率大的特点,这使它能够在空间中传播很长的距离,所以脉冲激光测距法可以对很远的目标进行测量,因此适用于一些测程需求较长的平台,如卫星平台,机载平台,大部分移动式车载平台,小部分固定激光扫描仪等等
- 相位测量的平均功率远低于脉冲激光的峰值功率,另外,只能测量小于2π的相位差,且测距精度受相位差的分辨率限制,故相位测距的测程较短(一般100m左右),因此适用于一些测程需求较短的平台,如小部分移动式车载平台,大部分固定激光扫描仪等等
- 光纤维电扫描。光纤维电扫描方式的发射光路和接收光路一一对应,激光发射频率不受航高和视场角约束,点云数据密度均匀,但是扫描角度小且固定,地面覆盖偏窄
为什么激光扫描获得的点云分布是不均匀的?请分析具体原因
- 激光扫描仪所采用的扫描方式。不考虑地形起伏的影响,在圆锥扫描方式中,扫描带两侧数据密度大,中间部分稀;线扫描方式的情况类似;在光纤扫描方式中,扫描线方向上的光斑密度大于垂直扫描线上方向的密度
- 入射角。入射角越大,收到的回波信号越强, 入射角为90度时信号最强,垂直发射,垂直返回
- 目标物体本身材质对激光脉冲的吸收不同。如激光雷达发射波段容易被水会吸收,数据不能很好的返回
- 其它原因还包括飞行速度、扫描仪与地形/地物的相对位置/方向等。例如,对建筑物的倾斜尾顶而言,朝向扫描仪方向的屋顶会反射更多的信号,在数据集中时就农现为两个屋顶平面上数据密度存在差异。地面激光扫描仪是按照水平和垂直方向等角度间隔步进采样,扫描角越大,点间隔也越大,再加上各种偶然误差的影响,所以导致点云的空间的分布并不规则
三、课堂作业
Q1:对于脉冲式激光测距,如果测距精度是1cm,测时精度是多少?
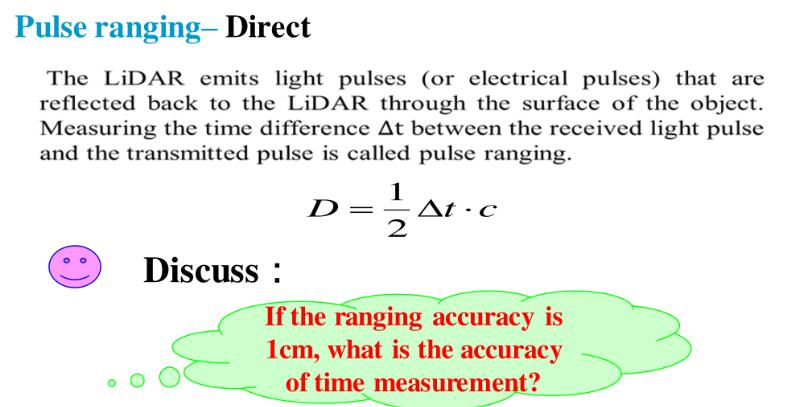
翻译:激光雷达发射光脉冲(或电脉冲),通过物体表面反射回激光雷达。测量接收光脉冲与发射光脉冲之间的时间差称为脉冲测距。
回答:D的精度为10-2m。c为光速,这里取值3×108m/s,故时间计算为2/3×10-10s,那么此时的测时精度应该为10-11s。
Q2:对于相位式激光测距,如果测距精度是1cm,相角测量精度是多少?
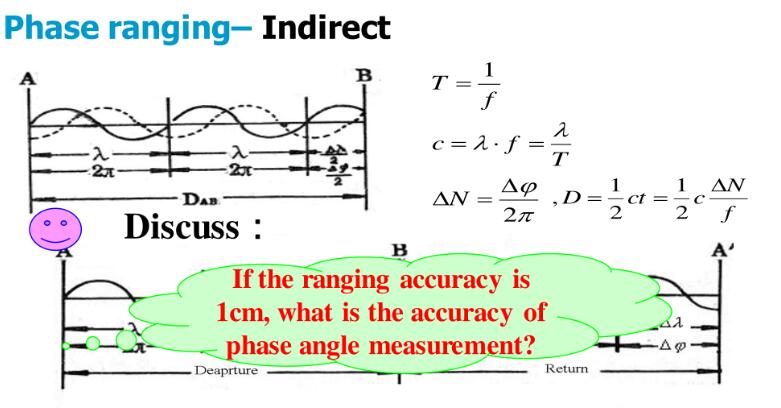
翻译:相位测距是通过测定“调制光波”的往返相位差来间接测量距离的一种方法,需要保证所测的A、B两点之间的距离不能大于光波的波长,避免像上图中的整周相位差的出现(相位式激光测距无法测定整周相位差)。
回答:由上图的第三个公式知,回答这个问题前还需要知道频率f的精度,这里设定测距范围为100m,那么根据光波的往返两个过程可知此时的波长λ需为200m,根据已知量简化公式为:D=1/2×λ×ΔN,得到此时的ΔN为10-4,故相角测量精度是10-4。
Q3:脉冲式激光测距与相位式激光测距的区别?
“激光测距里的千里眼”——脉冲激光测距法
- 脉冲激光具有峰值功率大的特点,这使它能够在空间中传播很长的距离,所以脉冲激光测距法可以对很远的目标进行测量。很远是有多远呢?目前人类历史上最远的激光测量距离是地球和月亮之间的距离,他们采用的就是脉冲激光测距法。自2019年6月以来,我国天琴计划团队已经多次成功实现地月距离的测量,通过对脉冲飞行时间的精确计时,得到地月距离在351,000 km到406,000 km(椭圆轨道)之间波动。
- 脉冲激光测距是一种发展十分成熟的测距体制,不仅可以用来对远目标探测,还可以用在数公里甚至数十米测量场景下。目前的汽车自动驾驶中也大多采用这种方法,其测距精度可以达到厘米量级,这对大部分的应用场景已经足够。
“明察秋毫”的相位激光测距法
- 对那些对测距精度要求较高的应用场景,如“空间交汇对接”中最后的接近段等,厘米级的测距精度已经不能满足它们的要求,这时候需要用相位激光测距的方法来测量。
- 相位激光测距发射的是经过了调制的连续激光信号,通过测量回波信号与发射信号之间的相位差来确定目标的距离。与脉冲激光测距相比,相位式激光测距法有更高的测距精度,其测距精度可以达到毫米级。但是由于相位式测距发射的激光为连续波,这使得它的平均功率远低于脉冲激光的峰值功率,因而无法实现远距离目标的探测。我们生活中常用的手持式激光测距仪大多都是采用相位激光测距的方法。
LiDAR 22.04.27课堂笔记文件汇总相关推荐
- LiDAR 22.04.30课堂笔记文件汇总
激光雷达按载荷平台分类有那些? 1.机载激光雷达 机载激光雷达是将激光测距设备.GNSS设备和INS等设备紧密集成,以飞行平台为载体,通过对地面进行扫描,记录目标的姿态.位置和反射强度等信息,获取地表 ...
- web漏洞“小迪安全课堂笔记”文件操作安全,文件包含
小迪安全课堂笔记文件包含 思维导图 原理 白盒 黑盒 看参数及功能点 本地包含 无限制,跨目录../../www.txt 有限制,增加了后缀html %00截断绕过 长度截断绕过 远程包含 无限制 有 ...
- Ubuntu 22.04 解决使用 .AppImage 文件方法
AppImages 是一个文件系统,需要 FUSE 版本为 2 才能运行,但是 Ubuntu 22.04 的发行版本没有对其进行原始的配置的安装,重新安装并且配置即可 终端问题: 未加载到 libfu ...
- 【考研计算机组成原理】课堂笔记目录汇总——知识点清晰
文章目录: 一:基础笔记 二:强化笔记 三:冲刺笔记 一:基础笔记 [考研计算机组成原理]课堂笔记1 第一章 计算机系统概论Introduction to computer systems [考研计算 ...
- web漏洞“小迪安全课堂笔记”文件操作安全,文件上传
文件上传小迪安全笔记 思维导图 利用思路 什么是文件上传漏洞? 文件上传漏洞有哪些危害? 文件上传漏洞如何查找及判断? 文件上传漏洞有哪些需要注意的地方? 关于文件上传漏洞在实际应用中的说明? 案例 ...
- AI英特尔杯公开课:2019.06.27在线直播《研究生人工智能创新大赛—AI赋能,创新引领》课堂笔记和感悟(一)
AI英特尔杯公开课:2019.06.27在线直播<研究生人工智能创新大赛-AI赋能,创新引领>课堂笔记和感悟(一) 导读 讲解总体不错,知识点比较基础,适合入门,各种主流框架都有 ...
- AI公开课:19.04.04李航—字节跳动AILab总监《深度学习与自然语言处理:评析与展望》课堂笔记以及个人感悟
AI公开课:19.04.04李航-字节跳动 AI Lab总监<深度学习与自然语言处理:评析与展望>课堂笔记以及个人感悟 导读 1.关于李航教授 李航,字节跳动科技有限公司人工智 ...
- AI公开课:19.02.27周逵(投资人)《AI时代的投资逻辑》课堂笔记以及个人感悟
AI公开课:19.02.27周逵(投资人)<AI时代的投资逻辑>课堂笔记以及个人感悟 目录 课堂PPT图片 精彩语录 个人感悟 课堂PPT图片 精彩语录 更新中-- 文件图片已经丢失-- ...
- AI公开课之NLP:19.04.04李航—字节跳动AILab总监《深度学习与自然语言处理:评析与展望》课堂笔记以及个人感悟
AI公开课之NLP:19.04.04李航-字节跳动AILab总监<深度学习与自然语言处理:评析与展望>课堂笔记以及个人感悟 导读 1.关于李航教授 李航,字节跳动科技有限公司人 ...
最新文章
- 基于关键帧的RGB-D视觉惯性里程计
- 基克的聚合 机器人_新版本辅助装大改 基克的聚合不能错过
- 支付产品必懂的会计基础及如何应用
- 新特性的副产品--从11g的DEFERRED SEGMENT CREATION说起
- 第10章:项目沟通管理和干系人管理-章节重点
- ie手机浏览器_IE永不为奴?微软Edge浏览器开启双核模式
- Java多态的成员特点及优缺点详解
- 苹果新的编程语言 Swift 语言进阶(一)--综述
- Linux 混合编译opencv与opencv_contrib的android版本
- Windows内存管理(3)--检查内存可用性,结构化异常处理 和 ASSERT
- matlab给hfss建模,HFSS-MATLAB联合建模
- Android APK反编译详解(转)
- 新手思考如何开发自己的软件
- 设计模式(Design Patterns)
- mysql2008 精简版_精简版 SqlServer2008 的安装和使用
- HDI与普通PCB的4点主要区别
- Git 工具 - 储藏(Stashing) git stash 暂存现在工作区的内容
- echarts实现全国及各省市地图(内附地图json文件)
- python挖掘B站猛男手游公主连结的另类操作!
- FFmpeg源码分析:音频滤镜介绍(上)