目标检测中的AnchorFree起源
转载自:https://zhuanlan.zhihu.com/p/62573122
更新:加入一个UnitBox(ACM MM 2016)
最近物体检测又起大的波澜,目标检测也发展了这么久了,每当我以为已经差不多了,达到瓶颈了,却又总会给我惊喜。今年年初,大量的anchor-free(类似吧,也不能说完全)的文章层出不穷,CornerNet,FCOS,FoveaBox,ExtremeNet,FSAF等等吧,我还惊奇的发现百度和中科院自动化所联合出的人脸检测的PyramidBox++(PyramidBox的改进版),竟然也加入了anchor-free,emmm,跟潮流速度很快啊!
我解读的PyramidBox文章:
TeddyZhang:人脸检测:PyramidBox(ECCV2018)zhuanlan.zhihu.com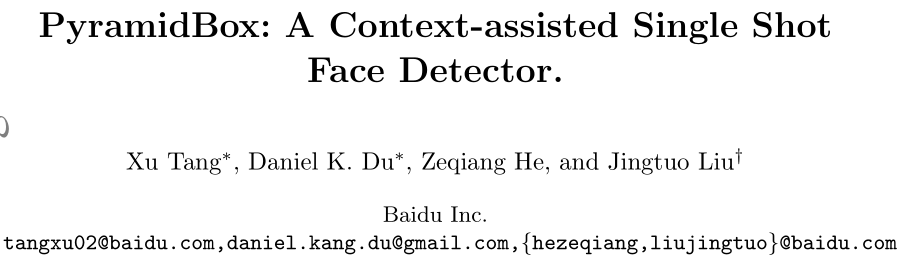
PyramidBox++:
PyramidBox++: High Performance Detector for Finding Tiny Facearxiv.org
DenseBox(2015)
这个工作在2015年就开始了,而现在再回过头来看,这个工作是多么有前瞻性,在论文中,作者就说了,DenseBox是一个不需要产生proposal且可以进行端到端地训练的FCN_Based的物体检测器,且更加关注那么尺寸小和严重遮挡的目标。所以在人脸数据集MALF进行验证模型性能!
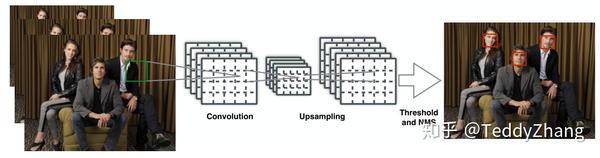
- 首先使用图像金字塔(这个思想后来演变成特征金字塔FPN)
- 经过一系列卷积和池化后,再进行上采样使特征图变大(用于检测更多的目标),再经过一些卷积得到最终的输出
- 把输出的特征图转换成边框,再通过NMS和阈值进行输出
测试阶段
在测试时,除了NMS算法,其余部分为一个全卷积网络,而且propasl的生成是不需要的,假如网络输入一张 的图片,其输出为
的feature map,且维度为5维,即
,t与b分别代表边框左上角和右下角,所以说输出feature map每个像素都对应一个带分数的边框,那么他的真实框是怎么产生呢?
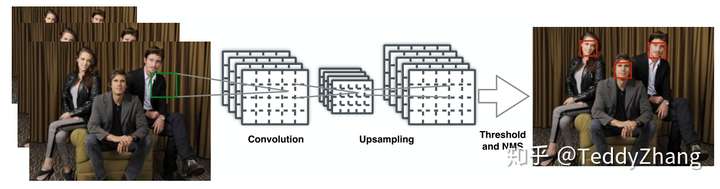
Ground Truth Generation
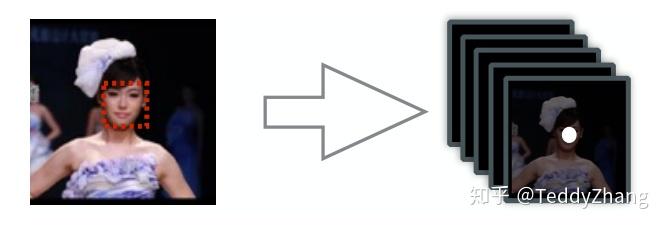
如果直接使用整幅图片进行训练的话,会在反向传播时浪费大量时间,于是使用了一种策略,对输入图片进行裁剪包含人脸和丰富背景的patches(目标检测的数据增强),在训练阶段,这些patches被裁剪后resize到240x240,其中人脸区域大约50像素。因此最后的输出为60x60且5通道的张量,因此Ground Truth在构建时,也得是60x60x5的张量,其人脸区域由一个以人脸bounding box的中心为圆心且半径为0.3倍(paper setting)的bounding box size的圆形区域确定,这个东西与segmentation类似。现在看来思想很超前!
在GT的第一个通道,我们用0来进行初始化,如果包含在正样本区域,那么就设置为1。其他的4个通道由该像素点与box的左上角和右下角的距离来确定。对于多张人脸,如果他们落在patch center的一定范围内,那么这些人脸就是正样本,其余的均为负样本。
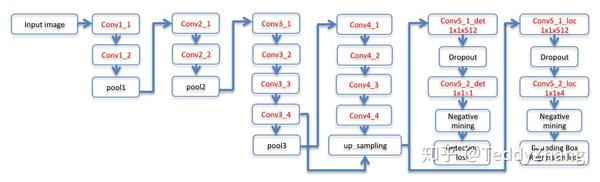
模型结构
使用了VGG19,由于进行了上采样,所以总体图像尺寸降了4倍!
YOLO(2015)
YOLO算法也是我们的老朋友了,但这一版用的人不多,因为当时SSD的火爆,YOLO的检测准确率并不是那么高。今天我们用Anchor Free的思路再来重读YOLO,又是另一番感受!
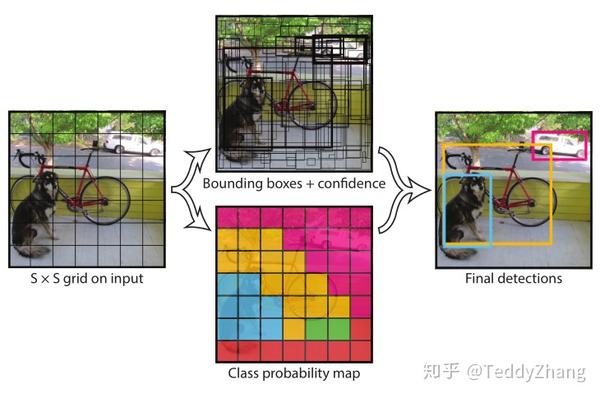
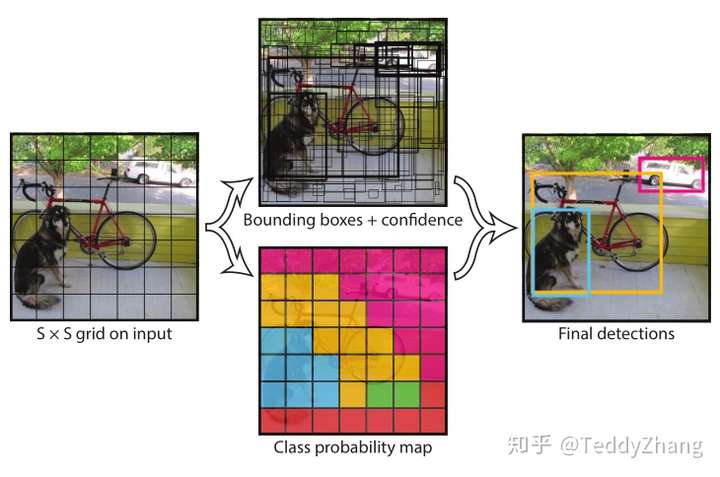
YOLO是一个单CNN模型的同时可以预测多个bounding box以及其分类概率,直接对全图进行训练。首先,YOLO会把输入图片分为SxS个网格,如果目标的中心落在了网格内,那么这个网格负责检测这个目标。接着我们定义其置信度
, 因此每个bounding box包括了5个预测值:x, y, w, h和confidece。YOLO算法把检测当做一个回归问题来解决,加入把图片分成SxS个网格且每个网格预测B个bounding box以及对应的confidence以及最终的类别预测C。那么最后一张图片的预测结果应该是一个
的张量。
论文中B=2,S=7,C=20.
YOLO缺点分析
作者在论文中也谈到了YOLO的缺点,最主要的缺点就是识别小物体,如小鸟。以及边框的位置偏差很大,当识别物体数量很多时也不可以。
其主要原因为只使用最后一层作为预测,且只有49个网格进行预测,而每个网络的感受野又很大,所以导致小物体检测不到。
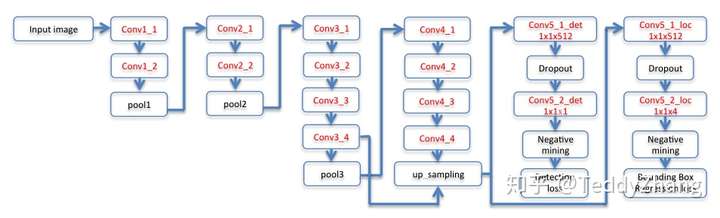
UnitBox (ACM MM 2016)
这篇论文的思路可能受DenseBox的启发,大致的框架是差不多的,主要贡献就是把DenseBox中的L2损失进行了优化,改成了一个IOU loss.
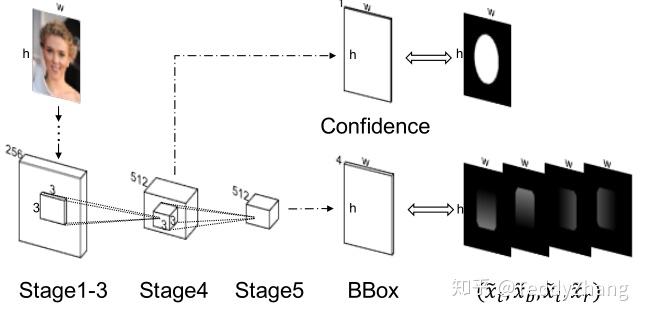
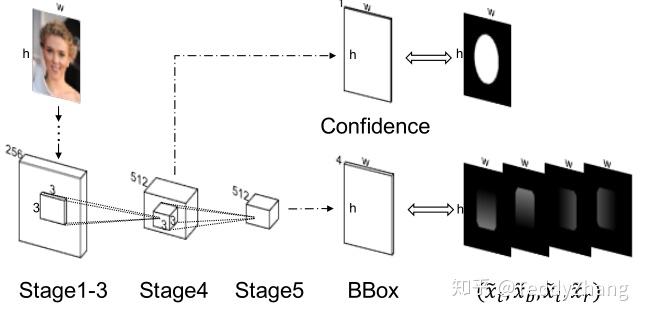
可以看出这个架构和DenseBox差不多,也是通过上采样把BBox和Confidence尺寸保持一致,但不同的是对于位置参数的定义,在UnitBox中,其位置参数定义为:
分别表示中心区域到上、下、左、右四个边的距离,具体我们可以看下图的表示,而且
表示真实标签!
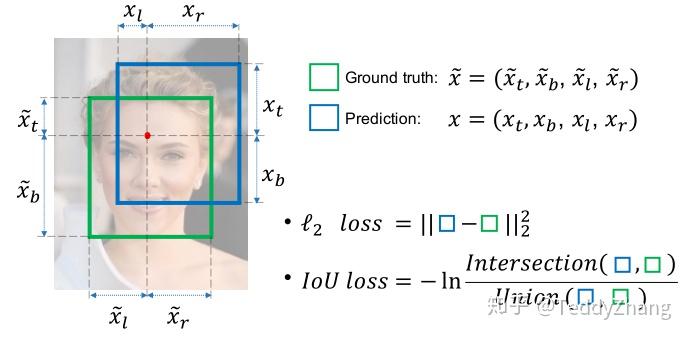
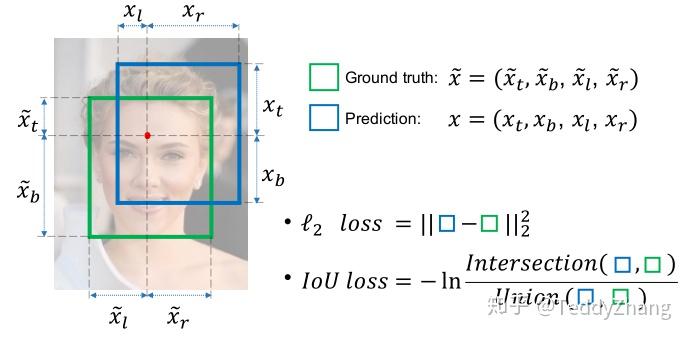
那么为什么不使用L2 loss呢?IOU loss如何构建呢?
如上图的L2损失需要同时去优化四个独立的变量,这就会导致一个预测框的一个或两个变量非常接近真实框,但整体来看却不是那么好!另外一个原因,给定两个像素点,一个落在较大的bounding box,另外一个落在较小的bounding box,这样去计算L2 loss时,显而易见,前者对于bounding box影响更大,这就导致模型优化更加关注较大的物体,而忽略较小的物体。为了解决这个问题,有的工作提出了normalized l2 loss,但相应的也影响检测效率。
所以作者提出了一个基于IOU的loss函数,假设我们经过上上图ReLU层后得到 ,真实框为
,
分别表示中心区域到上、下、左、右四个边的距离。
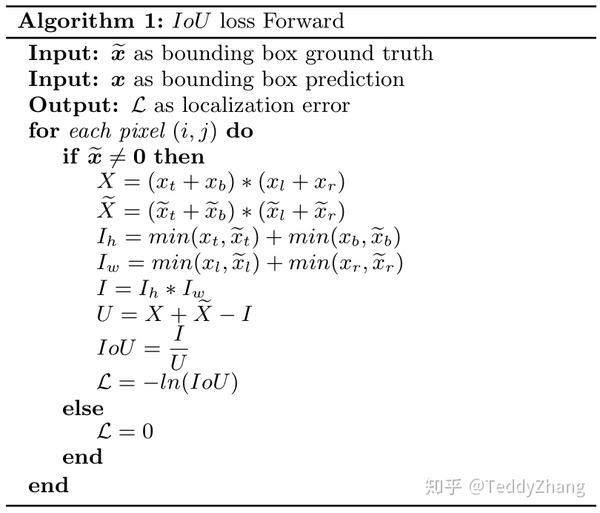
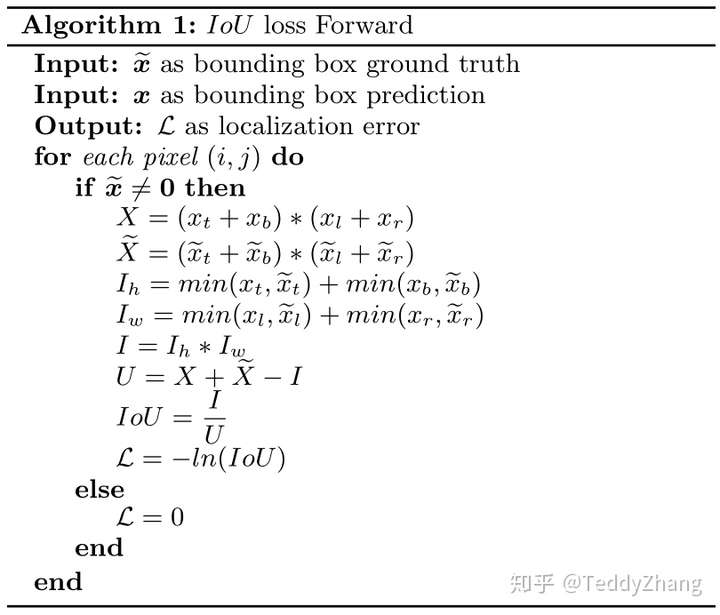
我们可以看出,IoU loss是将boundingbox当做一个整体来进行优化的,而L2 是对bounding box的4个分量来进行优化的,另外,由于IoU最后被计算范围到[0, 1],这个优点就允许网络可以通过多尺度的目标进行训练,然后再单尺度的图像上进行测试!
思考
为什么现在Anchor Free算法又这么火了呢?我觉得这篇文章讲的很好,FPN和Focal loss的发展是很重要的一环!
陈恺:物体检测的轮回: anchor-based 与 anchor-freezhuanlan.zhihu.com
至于最近刚出的一些论文,待我慢慢读完,再来解读,哈哈~
目标检测中的AnchorFree起源相关推荐
- 目标检测中的Anchor-free回顾
点击上方"3D视觉工坊",选择"星标" 干货第一时间送达 Anchor-free 的检测算法可分为anchor-point的算法和key-point的算法.An ...
- anchor free 目标检测_《目标检测》系列之二:目标检测中的Anchor机制回顾
前段时间,YOLOv4&v5大火,很多人忽视了yolov5在anchor上的一些细节变化,因此,本文从Faster RCNN着手,逐步分析SSD.YOLOv4&v5的anchor机制. ...
- PPDet:减少Anchor-free目标检测中的标签噪声,小目标检测提升明显
本文转载自AI算法修炼营. 这篇文章收录于BMVC2020,主要的思想是减少anchor-free目标检测中的label噪声,在COCO小目标检测上表现SOTA!性能优于FreeAnchor.Cent ...
- 目标检测中的anchor-base与anchor-free
前言 本文参考目标检测阵营 | Anchor-Base vs Anchor-Free 如何评价zhangshifeng最新的讨论anchor based/ free的论文? - 知乎 基础知识 | 目 ...
- 目标检测中的anchor-based 和anchor free
目标检测中的anchor-based 和anchor free anchor-free 和anchor-based 区别 深度学习目标检测通常都被建模成对一些候选区域进行分类和回归的问题.在单阶段检测 ...
- 目标检测中如何定义正负样本,和正负样本在学习过程中loss计算起的作用
如何定义正负样本,和正负样本在学习过程中loss计算起的作用 正负样本定义 分类和回归head如何学习和利用划分后的正负样本(loss如何计算) 正负样本在分类中loss计算的处理 正样本在bbox ...
- 目标检测中的Tricks
点击上方"小白学视觉",选择加"星标"或"置顶" 重磅干货,第一时间送达 来自 | 知乎 作者 | roger 链接 | https: ...
- 目标检测中的特征冲突与不对齐问题
点击上方"小白学视觉",选择加"星标"或"置顶" 重磅干货,第一时间送达 本文转自|深度学习这件小事 前言 昨天看到一篇商汤的刷榜文< ...
- 【TPAMI2020】目标检测中的不平衡问题:综述论文,34页pdf
关注上方"深度学习技术前沿",选择"星标公众号", 资源干货,第一时间送达! 作者:ChenJoya 知乎链接:https://zhuanlan.zhihu.c ...
最新文章
- 关于人脸识别滥用的十个可能的应对方案
- java B2B2C 仿淘宝电子商城系统-Spring Cloud Feign的文件上传实现
- php数组分开_PHP学习之五:数组(三)合并、拆分、接合和分解数组
- 计算机设计策略,专家经验谈:Excel工作表的设计策略
- C语言程序返回值为int的时候,不同值代表不同的意义
- 带你一起学软件工程的专业英语!(IT行业、四六级党快记起来)《软件工程专业英语》第一单元:启动软件项目——单词、短语、名词缩写、难句、备忘录的基本格式样本(必备技能)
- php mysql 值是否丰在_php 查询数据库表 判断 某值是否存在
- linux下gsl怎么运行,linux下gsl安装问题与解决
- 传 ofo 年底裁员超 50%;Vivo 支持谷歌 Fuchsia OS;Spring Boot 2.2.2 发布 | 极客头条
- python100例详解-几个小例子给你讲解Python中类的描述符
- 一个很好的反选的例子
- eclisp导入jsp项目之基础
- 多态_python的小窝_百度空间
- coreldraw快速撤回_cdr返回上一步的快捷键是什么?
- 不登陆路由器查询路由器IP地址和物理地址
- CentOS7离线安装Cloudera Manager 5.14.1
- shell脚本 插队
- 小武与GPU与pytorch的bug 还有反向传播
- eNB、gNB、en-gNB和ng-eNB的区别
- 学习制作FlappyBird时遇到的问题