ROS Navigation-----TF配置
下文主要介绍如何用TF设置机器人。
1 Transform Configuration(变换配置)
许多ROS功能包,需要利用tf软件库发布机器人可以识别的变换树。在抽象层面上,变换树定义的就是一种“偏移”,代表了不同坐标系之间的相对平移和旋转。具体点来说,设想有一个简单的机器人,只有一个基本的移动机体和挂在机体上方的扫描仪。基于此,我们定义了两个坐标系:一个对应于机体中心点的坐标系,一个对应于扫描仪中心的坐标系。分别取名为“base_link”和“baser_laser”。关于坐标系的命名习惯,参考 REP 105.
现在假设我们已经从传感器获取了一些数据,以一种代表了物体到扫描仪中心点的距离的形式给出。换句话说,我们已经有了一些“base_laser”坐标系的数据。现在,我们期望通过这些数据,来帮助机体避开物理世界的障碍物。 因此我们需要一种方式,把传感器扫描的数据从“base_laser”坐标系转换到“base_link”坐标系中去。本质上,就是定义两个坐标系的“关系”。
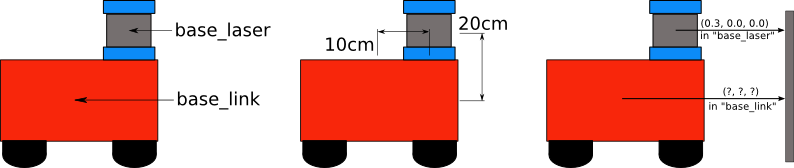
为了定义这种关系,假设我们知道传感器是挂在机体中心的前方10cm,高度20cm处。这就等于给了我们一种转换的偏移关系。具体说就是从传感器到机体的坐标转换关系应该为(x:0.1m,y:0.0m, z:0.2m),相反机体到传感器的转换即是(x:-0.1m,y:0.0m,z:-0.2m)。
我们可以选择去自己管理这种变换关系,意味着需要自己去保存,以及在需要的时候调用。但是这种做法的缺陷是随着坐标转换关系数量的增加,而愈加麻烦。幸运的是,我们也没有必要这么干。相反,我们利用tf定义了这么一种转换关系,那么就让它来帮我们管理这种转换关系吧。
利用tf来管理这种关系,我们需要把他们添加到转换树(transform tree)中。一方面来说,转换树中的每一个节点都对应着一类坐标系,节点之间的连线即是两个坐标相互转换关系的一种表示,一种从当前节点到子节点的转换表示。TF利用树结构的方式,这样保证了两个坐标系之间的只存在单方向的转换,同时假设节点之间的连线指向是从parent到child。

基于我们简单的例子,我们需要创建两个节点,一个“base_link”,一个是“base_laser”。为了定义两者的关系,首先,我们需要决定谁是parent,谁是child。 时刻记得,由于tf假设所有的转换都是从parent到child的,因此谁是parent是有差别的。我们选择“base_link”坐标系作为parent,其他的传感器等,都是作为“器件”被添加进robot的,对于“base_link”和“base_laser”他们来说是最适合的。这就意味着转换关系的表达式应该是(x:0.1m,y0.0m,z:0.2m)。 这种关系建立后,转换“base_laser”坐标系收到的数据到“base_link”坐标系的过程,通过简单的调用tf库即可完成。我们的机器人利用这些信息,在“base_link”坐标系中就可以用传感器扫描出的数据做出推理,安全的规划路径来绕过障碍物。
2 Writing Code(代码编写)
首先,我们需要创建一个node,在我们机器人系统发布坐标系转换关系。其次,我们还必须创建一个node,来监听发布出来的这种转换数据,并利用这种数据进行坐标转换。我们可以在某个目录创建一个源码包,同时命名“robot_setup_tf”。添加依赖包 roscpp, tf, geometry_msgs。
$ cd %TOP_DIR_YOUR_CATKIN_WS%/src
$ catkin_create_pkg robot_setup_tf roscpp tf geometry_msgs另一个可选办法是利用navigation_tutorials的标准robot_setup_tf_tutorial包,可以通过如下命令安装,
$ sudo apt-get install ros-%YOUR_ROS_DISTRO%-navigation-tutorials 3 Broadcasting a Transform(广播变换)
至此,我们已经创建了package。下面需要创建节点,来广播转换(base_laser->base_link)。在robot_setup_tf包中将下面的代码粘贴到src/tf_broadcaster.cpp文件中去。
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>int main(int argc, char** argv){ros::init(argc, argv, "robot_tf_publisher");ros::NodeHandle n;ros::Rate r(100);tf::TransformBroadcaster broadcaster;while(n.ok()){broadcaster.sendTransform(tf::StampedTransform(tf::Transform(tf::Quaternion(0, 0, 0, 1), tf::Vector3(0.1, 0.0, 0.2)),ros::Time::now(),"base_link", "base_laser"));r.sleep();}
}现在对上面的代码作更细节的解释。
1)Tf功能包提供了一种实现tf::TransformBroadcaster ,使任务发布变换更容易。为了调用TransformBroadcaster, 我们需要包含 tf/transform_broadcaster.h 头文件.
2)我们创建一个TransformBroadcaster对象,之后我们可以利用他来发送变换关系,即base_link → base_laser。
3)tf::StampedTransform()是关键部分。通过 TransformBroadcaster来发送转换关系,需要附带5个参数。
第1个参数,传递旋转变换,在两个坐标系之间任意旋转变换,都必须调用btQuaternion.现在情况下没有旋转,所以我们在调用btQauternion的时候,将pitch,roll,yaw的参数都置0;第2个参数,btVector3,任何平移都需要调用它。本例中我们确实有一个平移,所以我们调用了btVector3,相应的传感器的x方向距离机体基准偏移10cm,z方向20cm;
第3个参数,我们需要给转换关系携带一个时间戳,我们标记为ros::Time::now();
第4个参数,我们需要传递parent节点的名字;
第5个参数,传递的是child节点的名字;
4 Using a Transform(调用变换)
上面的代码,我们创建了一个节点来发布转换关系(baser_laser->base_link)。现在,我们需要利用转换关系,将从传感器获取的数据转换到机体对应的数据,即是“base_laser”->到“base_link”坐标系的转换。在robot_setup_if功能包中,在src目录下创建tf_listener.cpp,并将下面的代码粘贴到里面:
#include <ros/ros.h>
#include <geometry_msgs/PointStamped.h>
#include <tf/transform_listener.h>void transformPoint(const tf::TransformListener& listener){//we'll create a point in the base_laser frame that we'd like to transform to the base_link framegeometry_msgs::PointStamped laser_point;laser_point.header.frame_id = "base_laser";//we'll just use the most recent transform available for our simple examplelaser_point.header.stamp = ros::Time();//just an arbitrary point in spacelaser_point.point.x = 1.0;laser_point.point.y = 0.2;laser_point.point.z = 0.0;try{geometry_msgs::PointStamped base_point;listener.transformPoint("base_link", laser_point, base_point);ROS_INFO("base_laser: (%.2f, %.2f. %.2f) -----> base_link: (%.2f, %.2f, %.2f) at time %.2f",laser_point.point.x, laser_point.point.y, laser_point.point.z,base_point.point.x, base_point.point.y, base_point.point.z, base_point.header.stamp.toSec());}catch(tf::TransformException& ex){ROS_ERROR("Received an exception trying to transform a point from \"base_laser\" to \"base_link\": %s", ex.what());}
}int main(int argc, char** argv){ros::init(argc, argv, "robot_tf_listener");ros::NodeHandle n;tf::TransformListener listener(ros::Duration(10));//we'll transform a point once every secondros::Timer timer = n.createTimer(ros::Duration(1.0), boost::bind(&transformPoint, boost::ref(listener)));ros::spin();}1)我们包含tf/transform_listener.h头文件,是为了后边创建tf::TransformListener。
一个TransformListener目标会自主订阅变换消息的主题,同时管理所有的该通道上的变换数据。
2)创建一个函数transformPoint(),参数为TransformListener,作用为将“base_laser”坐标系的点,变换到“base_link”坐标系中表示。这个函数将会以ros::Timer定义的周期,作为一个回调函数周期调用。目前周期是1s。
3)时间timer回调函数中,我们创建一个虚拟点,作为geometry_msgs::PointStamped。消息名字最后的“Stamped”的意义是,它包含了一个头部,允许我们去把时间戳和消息的frame_id相关关联起来。我们将会设置laser_point的时间戳为ros::time(),即是我们请求TransformListener取得最新的变换数据。对于header里的frame_id,我们设置为“base_laser”,原因是我们创建的是扫描仪坐标系里的虚拟点。最后,我们将会设置具体的虚拟点,比如x:1.0,y:0.2,z:0.0 。
当我们已经有了从“base_laser”到“base_link”变换的点数据。下一步,我们通过TransformListener对象,调用transformPoint(),填充三个参数来进行数据变换。第1个参数,代表目标坐标系的名字。第2个参数源坐标系的点对象,第3个参数是要填充的目标坐标系的点对象。所以,在函数调用后,base_point里存储的信息就是变换后的点坐标。
如果因为某些其他的原因,变换不可得(可能是tf_broadcaster 挂了),调用transformPoint()时, TransformListener调用可能会返回异常。 本例中我们将会截获异常并把异常信息呈现给用户。
5 Building the Code(代码编译)
打开CMakeList.txt,在文件末尾添加下面的几行:
add_executable(tf_broadcaster src/tf_broadcaster.cpp)
add_executable(tf_listener src/tf_listener.cpp)
target_link_libraries(tf_broadcaster ${catkin_LIBRARIES})
target_link_libraries(tf_listener ${catkin_LIBRARIES})然后编译。
6 Running the Code(代码运行)
第一个窗口,运行master:
roscore
第二个,运行 tf_broadcaster
rosrun robot_setup_tf tf_broadcaster
第三个窗口运行tf_listener,将从传感器坐标系获取的虚拟点,变换到机体坐标系。
rosrun robot_setup_tf tf_listener
如果一切顺利,每隔1s就会输出信息。
注意:以上译自ROS wiki
ROS Navigation-----TF配置相关推荐
- 理解ROS Navigation Stack,看完这篇你就知道啦!
前言 ROS Navigation Stack是ROS提供的一个二维的导航功能包集合,通过输入里程计.传感器信息和目标位姿,输出控制机器人到达目标状态的安全速度指令.ROS Navigation St ...
- 【硬核】 ROS Navigation 局部路径规划常见算法
简介 最近,作者参加了关于RMUS 高校 SimReal挑战赛,首次接触到了机器人导航领域,这里记录一下这段时间的收货.sim2real的全称是simulation to reality,是强化学 ...
- ROS Navigation Tuning Guide(导航调试指南)
ROS Navigation Tuning Guide 导航调试指南 准备工作 距离传感器 里程计 定位 速度与加速度的设置 获得最大速度 获得最大加速度 设置最小值 XY方向的速度 Global P ...
- ROS Navigation导航包介绍
Navigation功能包集概述 这是2D的导航功能包集,通过接收里程计数据.tf坐标变换树以及传感器数据,为移动机器人输出目标位置以及安全速度.概念层面上讲,导航功能包集是相当简单的. 它从里程计和 ...
- ROS专题----tf和tf2坐标变换
ROS专题----tf和tf2坐标变换 ---- 工作区设置 如果您尚未创建用于完成教程的工作区, 请单击此处查看一些简要说明 . 从tf1迁移到tf2 转换数据类型 这是对转换数据类型的语法更改的快 ...
- 老王说ros的tf库
ros的tf库 为了这个题目,我是拿出了挤沟的精神挤时间,是下了功夫的,线性代数.矩阵论复习了,惯性导航里的dcm.四元数也了解了,刚体力学也翻了,wiki里的欧拉角也读了,tf的tutorial.p ...
- ros之TF坐标转换
ros之TF坐标转换 1.c++ demo01_turtle1.cpp #include <iostream> #include <ros/ros.h> #include &l ...
- ROS : Navigation 基于碰撞传感器、悬崖传感器的实时避障 [kobuki]
ROS : Navigation 基于碰撞传感器.悬崖传感器的实时避障 [kobuki] 话题消息 碰撞传感器 悬崖传感器 点云数据 传感器详细信息 基于碰撞传感器.悬崖传感器的实时避障 转点云数据源 ...
- ROS Navigation Stack安装
ROS Navigation Stack安装 Navigation导航包是做导航几乎都要用的,大家可以先去ROS Wiki上学习下 我们先Git下对应版本的软件包,我是Kinetic的,所以是Kine ...
- ROS之tf空间坐标变换完全详解
本博文主要汇总了自己在使用ROS中tf坐标变换包时查找的一些参考资料和博客,包括了tf和部分tf2的使用,在此感谢本博文中出现的所有的博客链接! 参考资源: ROS官网详细介绍: http://wik ...
最新文章
- 高效“炼丹”必备技能:一文实现深度学习数学原理入门,还有吴恩达老师亲授课程...
- 【 FPGA 】常数( localparam )和参数( parameter )
- Python基础数据类型之字符串(一)
- GDI绘制时钟效果,与系统时间保持同步,基于Winform
- boost::gil::compute_hessian_responses用法的测试程序
- 167. Two Sum II - Input array is sorted
- android实现手机拍照以及图片预览功能_手机系统将有A/B分区?Android 11这些变化你关注过吗...
- 笨方法“学习python笔记之函数
- Mongodb地理位置索引
- 【续上篇】推荐一款液晶电视测试软件
- How to get the xpath by clicking an html element
- u-boot的补丁文件patch
- 对shell的简单认识
- 通过命令行安装silverlight4
- Docker 端口映射到宿主机后, 外网无法通过ip访问对应宿主机端口
- 冲刺大厂每日算法面试题,动态规划21天——第十四天
- java读取xslx内容,内容转换成docx和pdf,包括图片
- 从公司角度来看,为什么要招实习生?
- 中国帆船行业现状分析及发展前景展望报告2022-2028年
- c语言欺凌,《中国校园欺凌调查报告》发布 语言欺凌占主导