slam打脸入门知识
先说视觉这块,首先射影几何的一些内容相机模型,单视几何,双视几何和多视几何。这些内容可以在Multiple View Geometry in Computer Vision这本书中找到。英文版的,另外中科院的吴福朝编著的“计算机视觉中的数学方法”也很好,涵盖了上述了MVG in CV book中的大部分内容,强烈安利。
然后是一些视觉特征,这方面就是一些特征,描述子,匹配相关等。见SIFT,ORB、BRISK、SURF等文章。
数学方面首先是三维空间的刚体运动,参考《机器人学(第2版)》 蔡自兴【摘要 书评 试读】图书。
关于优化,SLAM中的优化方法十分基本,参考高斯牛顿,LM,结合稀疏线性代数。其实用的时候会使用一种g2o的图优化库或者ceres。参考文章 g2o: A General Framework for Graph Optimization
http://ais.informatik.uni-freiburg.de/publications/papers/kuemmerle11icra.pdf
最难的应该算是李群和李代数,这方面可以参考book [state estimation for Robotics](http://asrl.utias.utoronto.ca/~tdb/bib/barfoot_ser15.pdf)。当然不想看书的话可以参考博客李代数 - 标签 - 半闲居士 - 博客园。
为了看论文的时候能够比较流畅,还应该具备一些概率论的知识,这里推荐book[Probabilistic Robotics](http://www.probabilistic-robotics.org/) [pdf](https://docs.ufpr.br/~danielsantos/ProbabilisticRobotics.pdf)
话说高翔博士近期完成一本SLAM的入门book,有理论有实践,写的不错,推荐。他包含了上述在视觉slam需要的所有基础知识,真是造福大众啊。详细研读此书,以后读各种论文就不会显得那么吃力了吧。最后列举一些玩slam的一些必备工具和相关资源。
tools
1. ubuntu, cmake, bash, vim, qt(optional).
2. OpenCV install, read the opencv reference manual and tutorial
3. ros, [install](ROS/Installation - ROS Wiki), [tutorial}(ROS/Tutorials - ROS Wiki).
4. python. 可以使用pycharm,作为IDE.
为什么使用ubuntu?因为大家的代码,全是用linux,而且很多使用ros的,ros一定是要Linux的,同时还要cmake。Ubuntu是比较适合初学Linux的人,非常好用。
somethind about Calibration
1. [opencv camera Calibration](http://docs.opencv.org/2.4/modules/calib3d/doc/camera_calibration_and_3d_reconstruction.html)
2. [matlab camera Calibration toolbox](Camera Calibration Toolbox for Matlab)
3. [svo camera Calibration](uzh-rpg/rpg_svo)
4. [ros wiki camera Calibration](camera_calibration - ROS Wiki)
为什么要标定相机呢,因为slam的模型中假设 相机的内参数是已知的,因此有了这个内参数我们才能正确的初始化slam系统。
slam open sources
1. [svo](uzh-rpg/rpg_svo)
2. [orb slam](raulmur/ORB_SLAM2)
3. [ar_tracker_alvar githun page](sniekum/ar_track_alvar) [ros page](ar_track_alvar - ROS Wiki)
4. [ros ptam](ethzasl_ptam - ROS Wiki),原始代码不支持ros, 这里给出ros版本的代码. 原始[代码](Oxford-PTAM/PTAM-GPL)[网站](Parallel Tracking and Mapping for Small AR Workspaces (PTAM))
5. DSO JakobEngel/dso
ros books
1. Learning ROS for Robotics Programming
2. 机器人操作系统(ROS)浅析
3. ros by example http://www.lulu.com/shop/http://www.lulu.com/shop/r-patrick-goebel/ros-by-example-indigo-volume-1/ebook/product-23032353.html
some blogs about ros
1. 古月居 - 怕什么真理无穷,进一寸有一寸的欢喜
SLAM基础学习
1. [Multiple View Geometry in Computer Vision](Multiple View Geometry in Computer Vision)。
2. Sparse Matrix [Sparse Non-Linear Least Squares in C/C++](Sparse Non-Linear Least Squares in C/C++)
3. [openSLAM](https://www.openslam.org/)
4. dataset [tum](RGB-D SLAM Dataset and Benchmark)
5. [PCL](PointCloudLibrary/pcl)
6. [opencv](OpenCV | OpenCV)
推荐阅读的书
1. [Multiple View Geometry in Computer Vision](Multiple View Geometry in Computer Vision)
2. [Probabilistic Robotics](http://www.probabilistic-robotics.org/) [pdf](https://docs.ufpr.br/~danielsantos/ProbabilisticRobotics.pdf)
3. [state estimation for Robotics](http://asrl.utias.utoronto.ca/~tdb/bib/barfoot_ser15.pdf)
4. [Quaternion kinematics for the error-state KF](http://www.iri.upc.edu/people/jsola/JoanSola/objectes/notes/kinematics.pdf)
5. 凸优化,https://web.stanford.edu/~boyd/cvxbook/bv_cvxbook.pdf
6. 线性系统理论,Chi-Tsong Chen: 9780199959570: Amazon.com: Books
7. An Invitation to 3-D Vision,https://www.eecis.udel.edu/~cer/arv/readings/old_mkss.pdf
8. Rigid Body Dynamics,http://authors.library.caltech.edu/25023/1/Housner-HudsonDyn80.pdf。
paper about vision slam
- Georg Klein and David Murray, "Parallel Tracking and Mapping for Small AR Workspaces", In Proc. International Symposium on Mixed and Augmented Reality (ISMAR'07, Nara).
- D. Scaramuzza, F. Fraundorfer, "Visual Odometry: Part I - The First 30 Years and Fundamentals IEEE Robotics and Automation Magazine", Volume 18, issue 4, 2011.
- F. Fraundorfer and D. Scaramuzza, "Visual Odometry : Part II: Matching, Robustness, Optimization, and Applications," in IEEE Robotics & Automation Magazine, vol. 19, no. 2, pp. 78-90, June 2012.
doi: 10.1109/MRA.2012.2182810
- A Kalman Filter-Based Algorithm for IMU-Camera Calibration Observability Analysis and Performance Evaluation
- SVO- Fast Semi-Direct Monocular Visual Odometry
- [eth zasl sensor](ethzasl_sensor_fusion - ROS Wiki),
- Stephan Weiss. Vision Based Navigation for Micro Helicopters PhD Thesis, 2012 pdf
- Stephan Weiss, Markus W. Achtelik, Margarita Chli and Roland Siegwart. Versatile Distributed Pose Estimation and Sensor Self-Calibration for Autonomous MAVs. in IEEE International Conference on Robotics and Automation (ICRA), 2012. pdf
- Stephan Weiss, Davide Scaramuzza and Roland Siegwart, Monocular-SLAM–based navigation for autonomous micro helicopters in GPS-denied environments, Journal of Field Robotics (JFR), Vol. 28, No. 6, 2011, 854-874. pdf
- Stephan Weiss and Roland Siegwart. Real-Time Metric State Estimation for Modular Vision-Inertial Systems. in IEEE International Conference on Robotics and Automation (ICRA), 2011. pdf
- Simon Lynen, Markus Achtelik, Stephan Weiss, Margarita Chli and Roland Siegwart, A Robust and Modular Multi-Sensor Fusion Approach Applied to MAV Navigation. in Proc. of the IEEE/RSJ Conference on - - Intelligent Robots and Systems (IROS), 2013. pdf
- [orb slam]
- Raúl Mur-Artal, J. M. M. Montiel and Juan D. Tardós. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Transactions on Robotics, vol. 31, no. 5, pp. 1147-1163, 2015. (2015 IEEE Transactions on Robotics Best Paper Award). PDF.
- Dorian Gálvez-López and Juan D. Tardós. Bags of Binary Words for Fast Place Recognition in Image Sequences. IEEE Transactions on Robotics, vol. 28, no. 5, pp. 1188-1197, 2012.
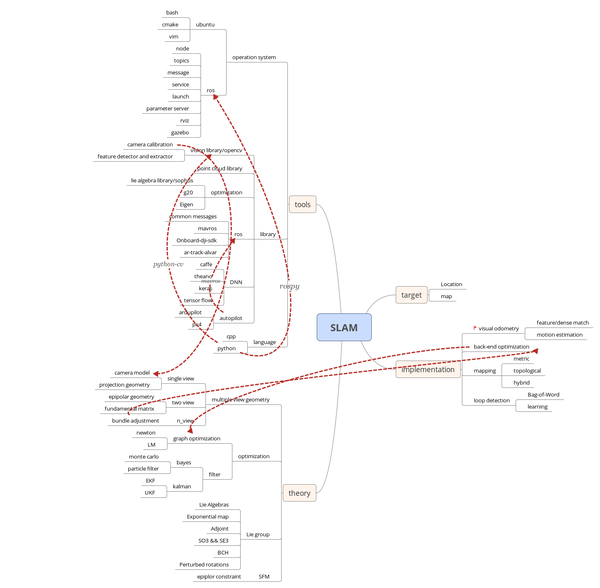
最后来张脑图
slam打脸入门知识相关推荐
- 重磅! SLAM从入门到精通系统教程汇总
3D视觉工坊相继推出了<透彻刨析室内.室外激光SLAM关键算法原理.代码与实战>.<激光-视觉-IMU-GPS融合SLAM算法:理论推导.代码讲解和实战>.<彻底搞懂基于 ...
- AMR SLAM ROS入门——前言
一.移动机器人介绍 目前,根据移动机器人在不同领域的应用场景,可以分为: 工业机器人:搬运机器人(AGV) 商用机器人:无人车(AMR).无人机.送餐机器人(AGV或AMR).导览机器人(AGV或AM ...
- 【图像配准】图像配准基础知识:入门知识、点云基础、图像配准的概念、基础和分类
图像配准基础 入门知识.背景 点云 点云是在同一空间参考系下表达目标空间分布和目标表面特性的海量点集合,在获取物体表面每个采样点的空间坐标后,得到的是点的集合,称之为"点云"(Po ...
- 【SLAM基础入门】贝叶斯滤波、卡尔曼滤波、粒子滤波笔记(1)
贝叶斯滤波.卡尔曼滤波.粒子滤波 (https://www.bilibili.com/video/BV1HT4y1577g?spm_id_from=333.999.header_right.histo ...
- java圆周率流程图,流程图、PI图入门知识 课件.doc
流程图.PI图入门知识 课件 流程图.PI图入门知识 基本定义 工艺流程图﹙又叫PI图﹚,通过图解的形式,表示出在化工生产过程中,由原料制得产品过程的物料和能量发生的变化及其流向:表示出生产中采用的化 ...
- 和与余数的和同余理解_5 同余 ——数论入门知识讲解系列
数学竞赛 数论是纯粹数学的分支之一,主要研究整数的性质,按研究方法分为初等数论和高等数论.中学生(甚至小学生)课外数学兴趣小组的许多内容是属于初等数论的,各级别数学竞赛也会把初等数论作为重点内容进行考 ...
- python 快速排序_小白入门知识详解:Python实现快速排序的方法(含实例代码)...
前言: 今天为大家带来的内容是:小白入门知识详解:Python实现快速排序的方法(含实例代码)希望通过本文的内容能够对各位有所帮助,喜欢的话记得点赞转发收藏不迷路哦!!! 提示: 这篇文章主要介绍了P ...
- oracle入门知识实施,新手必须了解的oracle入门知识
欢迎进入Oracle社区论坛,与200万技术人员互动交流 >>进入 oracle入门知识 一个表空间只能属于一个数据库每个数据库最少有一个控制文件(建议3个,分别放在不同的磁盘上) 每个数 ...
- ruby网站部署到服务器,入门知识: 把代码部署到服务器, SSH
入门知识: 把代码部署到服务器, SSH 2015-07-28 16:28 访问量: 2868 分类: 技术 如何登陆远程服务器呢? $ ssh root@your.server.com -p 334 ...
最新文章
- 强烈推荐8个值得下载的神仙软件,每一个都让人惊喜
- php 清空cache,到底如何清除 cache? 我真的快瘋了
- 谷歌眼镜开发入门经典
- 团队项目博客---移山小分队---3
- Xen虚拟化之一:Xen环境组件详解
- Redis两种持久化方式(RDBAOF)
- POJ3244(工科数学分析)
- 自己移植Asterisk1.8到OpenWRT下
- 新手如何学习C语言/C++,教你一年时间是拿到年薪50万
- python硬件编程_Python学习日记_《Python硬件编程实战》笔记_Mr_Ouyang
- Java深入了解TreeSet,和迭代器遍历方法
- Nginx源码分析 - 实战篇 - 编写一个阶段化的模块(25)
- Composite UI Application Block(Cab)比较详细的一片文章
- 使用IntelliJ IDEA开发Maven初始化创建流程
- 基于LMI的线性系统滑模鲁棒控制
- Python3 爬虫教程 - 新兴网页解析利器 parsel
- 赛事+内容IP齐发力,汽车之家打破Z世代次元壁
- 七、微信小程序运行报错:Error: AppID 不合法,invalid appid
- revit二次开发之程序调试
- AirFlow_使用