星秒科技tof激光雷达PAVO的ros驱动安装与测试
原链接:https://community.bwbot.org/topic/660
开发测试平台:小强机器人
下载链接:PAVO激光雷达windows资料包
1.在windows平台设置雷达网络接口参数
pavo雷达的网络接口是静态ip分配方式,且需要用官方配置软件编辑它的固件才能设置网络参数。
使用官网提供的PavoView软件,根据《PavoView使用指南-V1.1.2.pdf》手册设置雷达和主机的ip地址。因为主机往往还需要连接其他网络,因此最好按照下图设置成169.254.x.x网段,这个网段ubuntu默认为本地网络,不会干扰其它网络的运行。
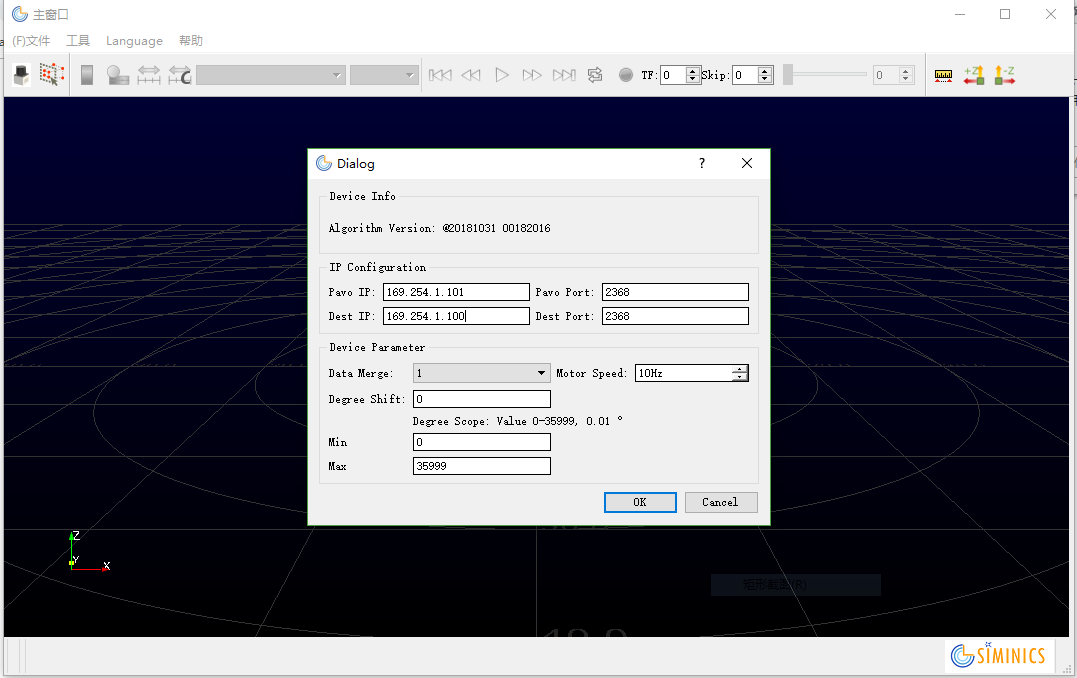
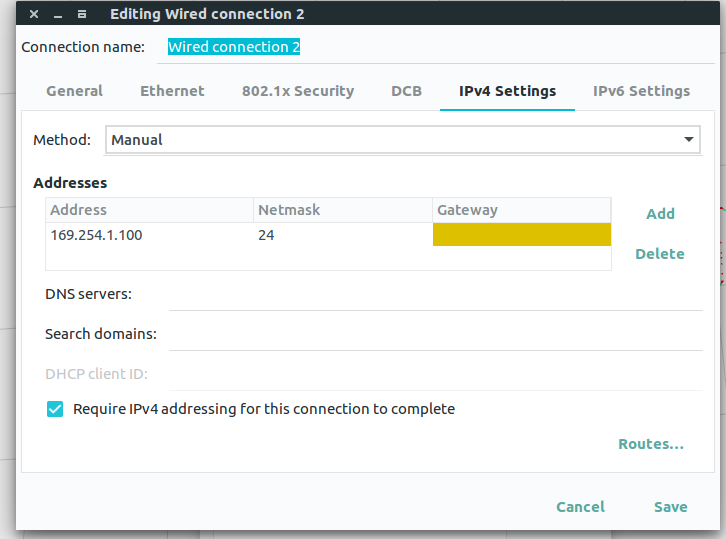
它的ros驱动也需要指定ip地址参数,为了后续教程的方便,请将ip地址按照上图的地址设成一模一样
2.根据步骤1中的ip地址设置ros主机的有线网络
3.安装ros驱包pavo_ros
#ros_rslidar需要安装到ros工作空间,以小强主机为例
cd ~/Documents/ros/src
git clone https://github.com/BluewhaleRobot/pavo_ros.git
#tof雷达会有拖尾现象,需要用laser_filters包进行过滤
git clone https://github.com/BluewhaleRobot/laser_filters.git
cd ..
catkin_make
4.将雷达接入电源,同时用网线连接ros主机,启动ros驱动launch文件
roslaunch pavo_ros xiaoqiang.launch
#启动成功后,驱动节点默认会发布10hz的点云话题/scan,这个话题的frame_id是laser,上面的launch文件也发布了base_link到laser的tf关系,请根据实际安装参数进行调整。
6.在rviz中显示发布的点云数据
roscd pavo_ros/rviz
rviz -d pavo_xiaoqiang.rviz
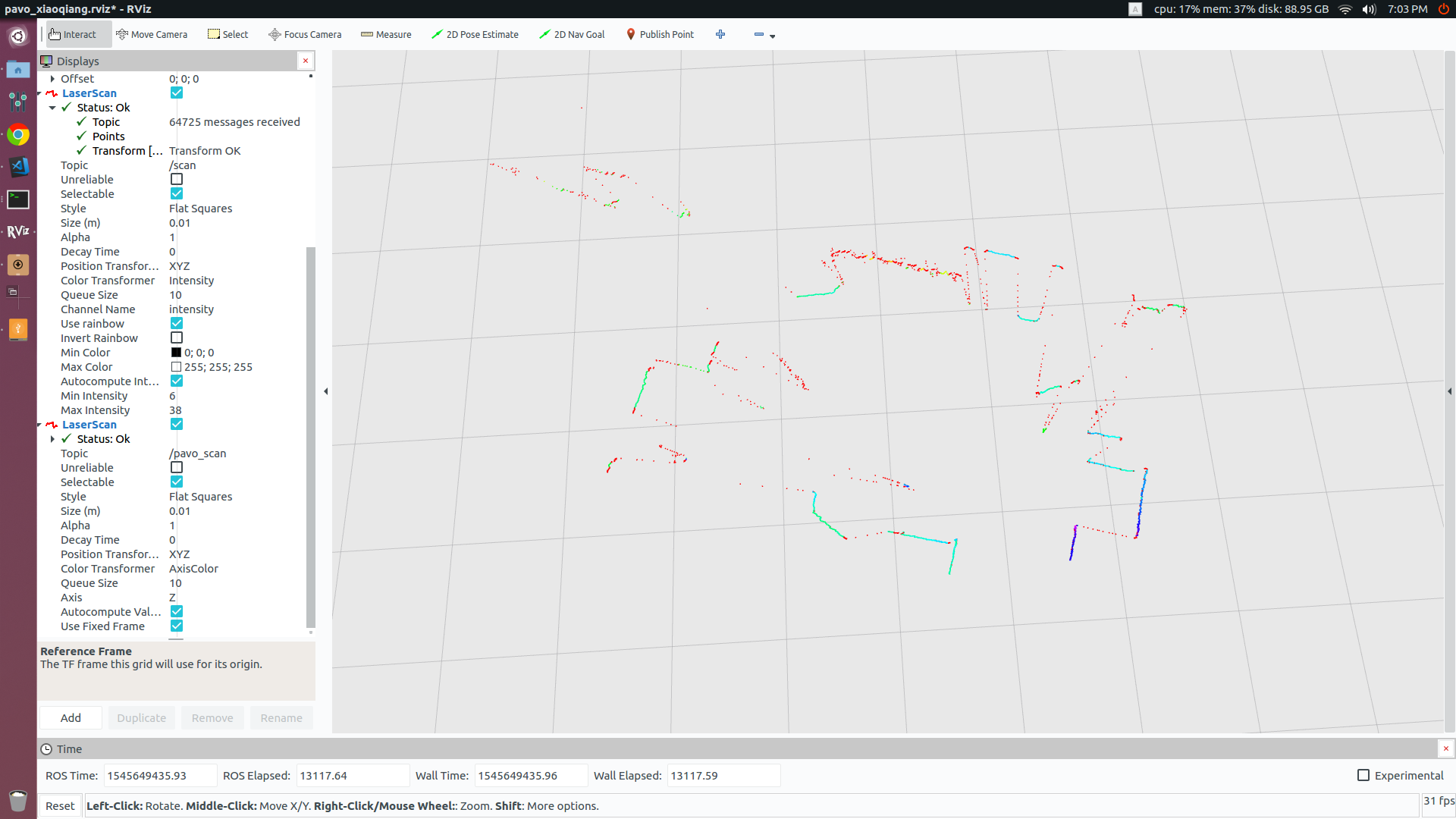
在rviz里面可以对比原始数据/pavo_scan和过滤处理后的数据/scan的区别。
星秒科技tof激光雷达PAVO的ros驱动安装与测试相关推荐
- 速腾聚创16线激光雷达rslidar-16的ros驱动安装与rviz点云显示
原链接: https://community.bwbot.org/topic/520 运行测试平台:小强ROS机器人 速腾聚创16线激光雷达rslidar-16的供电是直流12v 3A,通信接口是rs ...
- ouster-32激光雷达实测:ROS驱动编译使用与设备连接的网络配置
ouster-32激光雷达实测:ROS驱动编译使用与设备连接的网络配置 ouster-32 ROS驱动 驱动安装 依赖 下载 编译 功能包功能 连接到实时传感器 重播录制的包 录制新的包文件 设备连接 ...
- 速腾聚创16线激光雷达ros驱动安装与rviz点云展示说明
.速腾聚创16线激光雷达ros驱动安装与rviz点云展示说明 V1.0.0 – by Holden Date : 2021-10-12 文章目录 .速腾聚创16线激光雷达ros驱动安装与rviz点云展 ...
- 北洋雷达UST-10LX基于ROS都安装使用测试小问题
北洋雷达UST-10LX基于ROS都安装使用测试小问题 我使用的是UST-10LX型号 的激光雷达进行建图导航.下面的内容是在csdn上的一些回答的综合. 首先下载相关节点包,UST-10LX采用的接 ...
- ubuntu 18.04 LORD 3DM-GX5-45 IMU ros_mscl ros驱动安装
LORD 3DM-GX5-45 IMU ros_mscl ros驱动安装 drivers 驱动安装 安装ros_mscl ROS-MSCL Examples 测试 lord的ros_mscl包的安装网 ...
- 单线激光雷达(SICK)驱动安装及时空标定
一.引言 1.AGV需要同时具备定位.避障与导航的功能,其中避障对于雷达本身的分辨率.精度要求并不是很高,只需要能够根据预设定的雷达扫描范围准确避开障碍物即可,故本文以TIM240(SICK激光类雷达 ...
- ubuntu18.04 LORD 3DM-GX5-AHRS + ros驱动安装
如果不需要修改源代码,建议通过apt命令直接安装 sudo apt install ros-melodic-microstrain-inertial-driverroslaunch microstra ...
- ladybug5 ubuntu ros驱动安装说明
1.首先要安装ladybug5驱动,然后在安装ladybug5_ros. 驱动安装过程中报错及解决方法为: 安装驱动: 在Installing and Configuring Linux这一步中 su ...
- Xsens-MTI 670 ROS驱动安装及使用
1.开发驱动下载 https://www.xsens.com/setup 2.驱动安装 参考链接https://blog.csdn.net/learning_tortosie/article/deta ...
最新文章
- Phython 3 笔记2 —— 基础语法
- win10设置默认输入法_为什么说win10越来越好用了?(技巧篇)
- 在读博士一作发Nature,学校重奖50万!
- Newland Plan
- TypeError: Fetch argument has invalid type class ‘numpy.float32‘, must be a string or Tensor
- 2017-2018 20155309 南皓芯 信息安全基础设计第八周博客
- macOS Monterey 12.0beta4黑苹果镜像虚拟机版本
- 希沃集控系统流媒体服务器未开启,希沃集控,让教育信息化管理尽在“掌控”之中...
- 论win10专业版,企业版和教育版之间自由切换的方法和密钥
- MongoDB技术分享:WiredTiger存储引擎
- html屏蔽浏览器自动填充,禁止浏览器对表单自动填充的几种方法
- 基于SBO程序开发框架的实例:仓库扩展属性设置
- 诡辩:认知与智商税!外附送签名版国庆福利
- Oracle—tablespace使用
- ESO+LTV MPC算法笔记
- centos配置启动项_查看centos开机启动项命令 - 老牛博客
- PNAS:快速脑电波振荡识别并定位癫痫患者的大脑
- 如何看待2020校招数据分析岗位招聘情况?
- PMAC硬件-一个运动控制系统的实例
- 移动端携程网首页制作